
過去道路主管機關需蒐集並分析1~3年交通事故資料後,才能發現路口的安全問題,並加以改善以防止事故繼續發生。為防範事故於未然,運輸研究所結合近年來兩項最新科技技術:無人機空拍攝影及AI影像辨識,運用於解決路口交通衝突問題。在作業上,先以無人機在路口上方75-80公尺,以俯視清楚拍攝路口人、車流動情形,再運用AI影像辨識技術將影像轉換成人、車流動的軌跡,最後透過軟體分析軌跡資料,找出路口易發生交通衝突之點位及型態,也就是最容易發生車禍的地方,以協助道路主管機關診斷路口可能的危險熱區,並預先進行改善;此外,亦可比較改善前後衝突熱區的改變,來評估改善成效。
運輸研究所計畫於110-112年,每年選擇兩項路口安全議題,並與地方政府合作挑選路口進行分析。由於路口交通在「機會左轉(即左轉車無左轉專用時相,需趁對向直行車流之空隙進行左轉)」與「路口穿越衝突(即直行車因搶黃燈、闖紅燈等而與橫向來車發生衝突)」兩種情形,所發生交通事故之嚴重性相對較高,故110年先以此兩項議題,透過座談會與六都進行交流,除與北高兩市合作共挑選15個路口進行研究,並在臺北市、桃園市及臺南市選擇4處易肇事路口進行分析,做為後續改善之依據。此外,為推廣此創新分析工具,運輸研究所亦規劃於110年10月下旬辦理教育訓練課程,邀請各道路管理機關及顧問公司派員參與,以瞭解無人機空拍作業程序、AI影像辨識原理、分析軟體功能與操作程序等,讓實務單位能廣為應用於路口交通安全診斷及改善,提升路口安全。
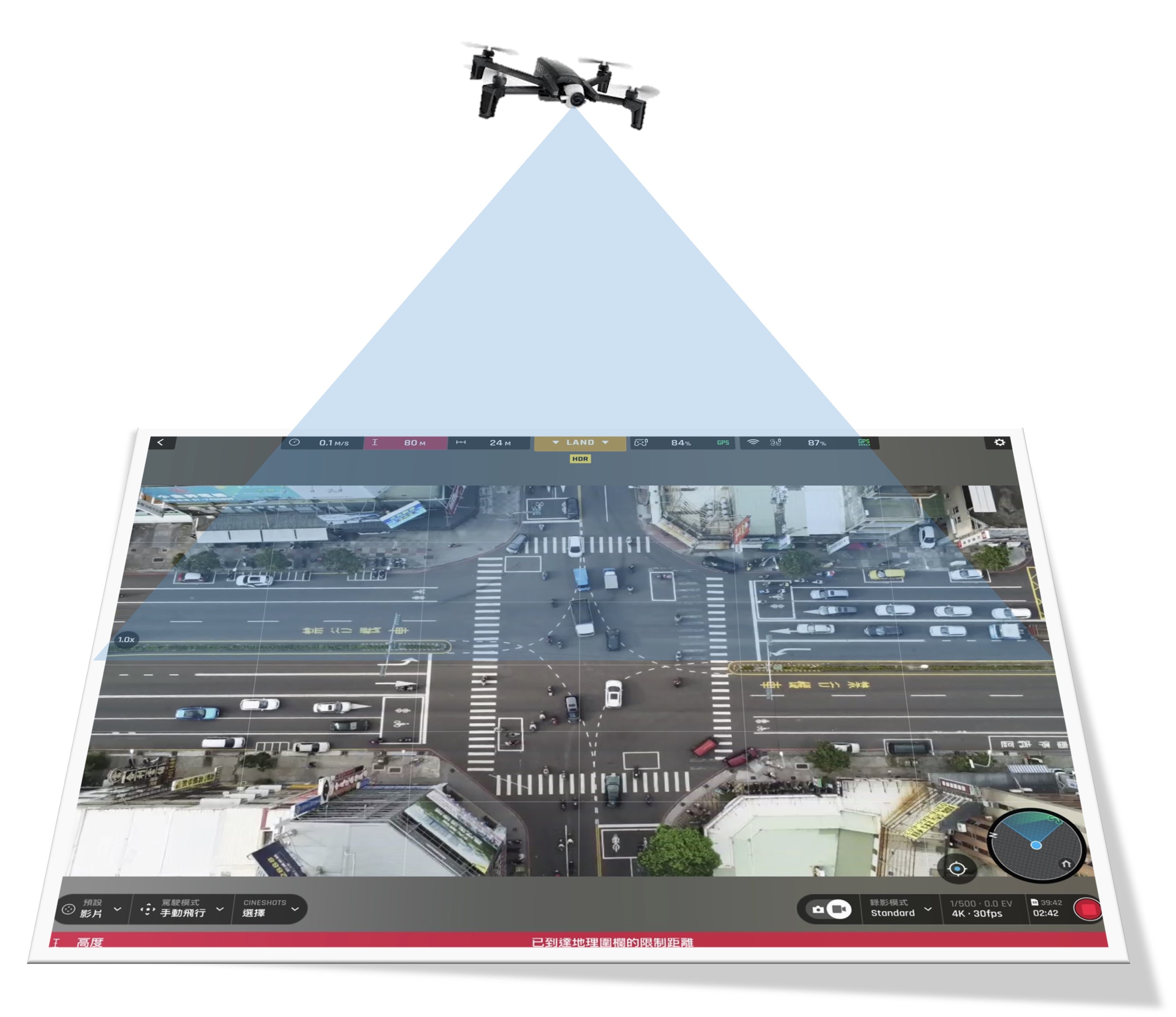
圖1 無人機空拍攝影示意圖
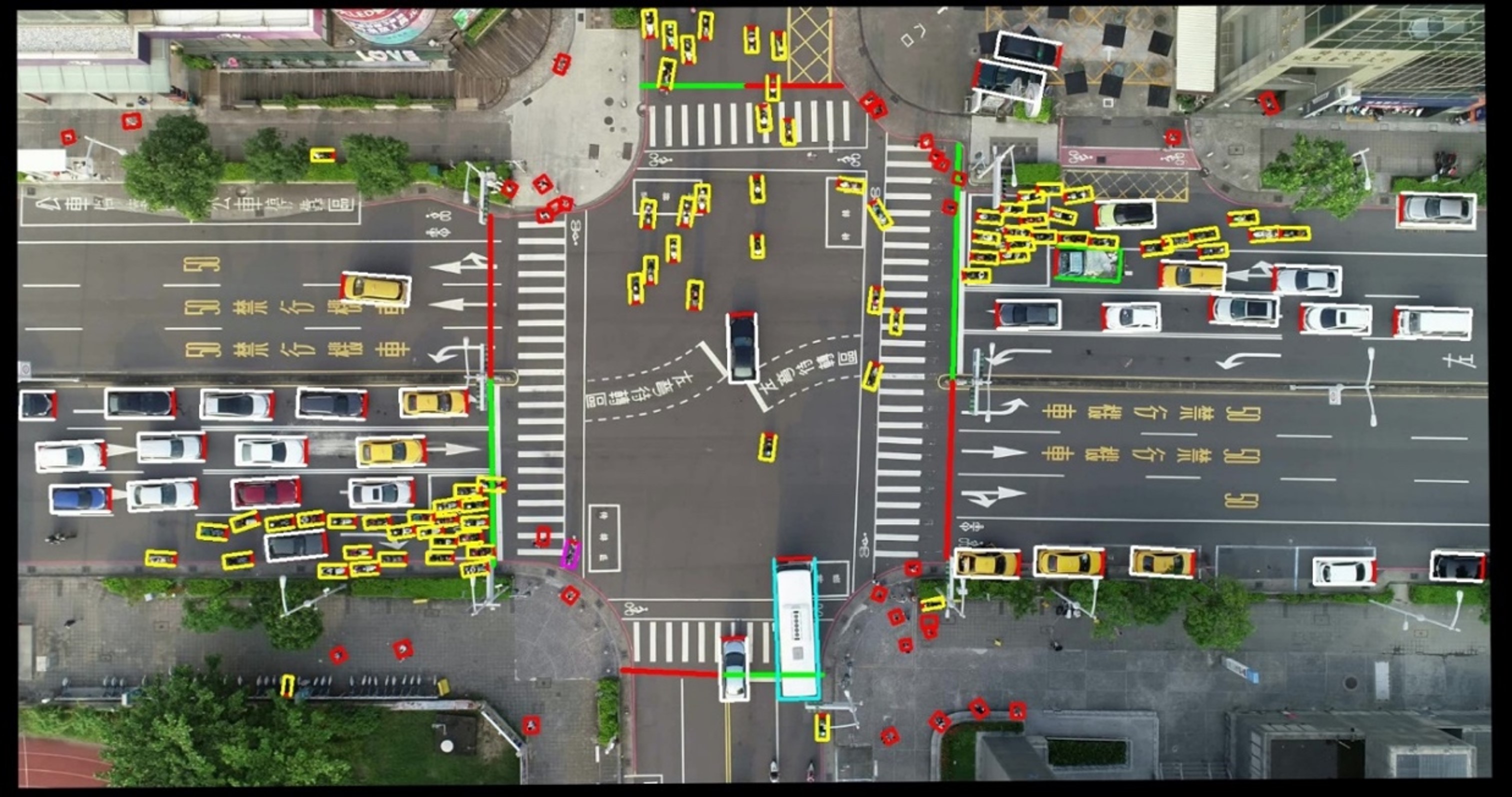
圖2 汽車、機車、行人的自動影像辨識
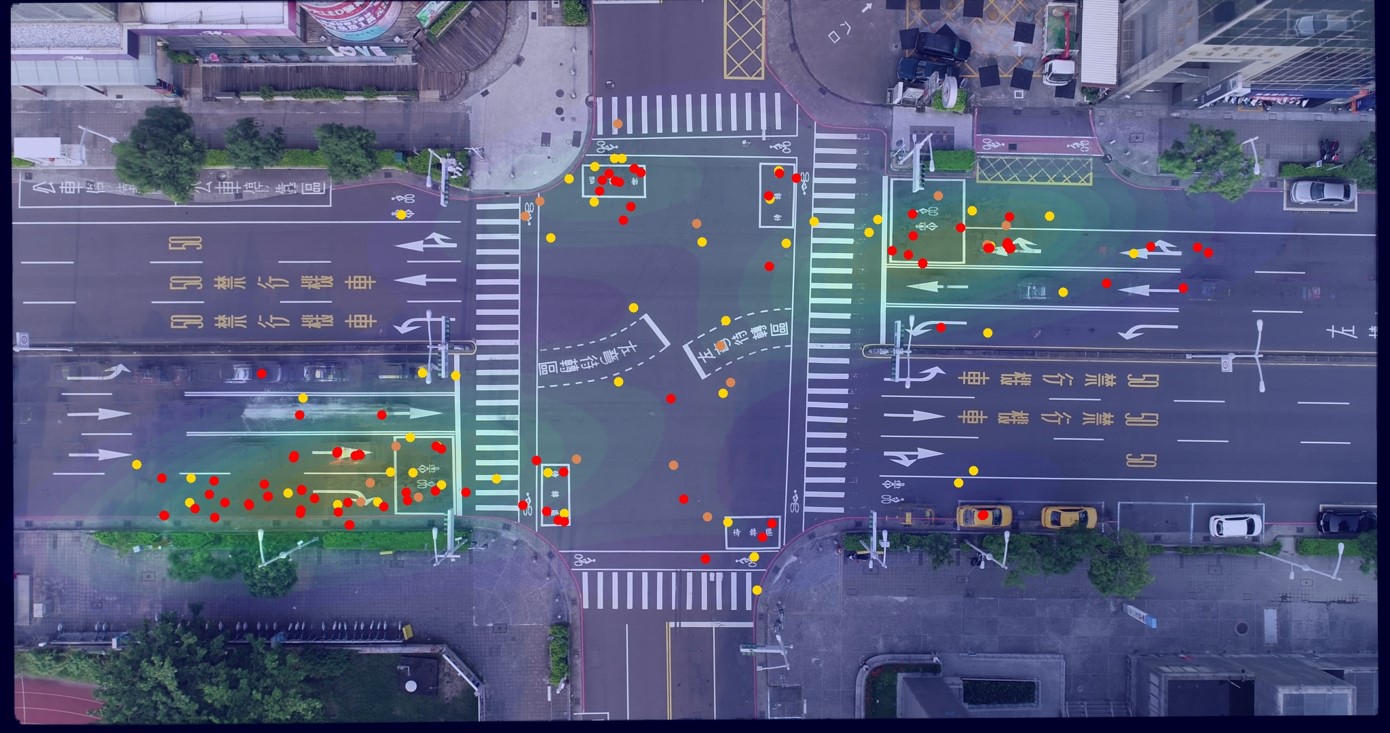
(紅色:瀕危衝突、橘色:高危險衝突、黃色:中危險衝突、綠色:低危險衝突)
圖3 路口衝突熱點圖 (以不同顏色代表衝突程度)

圖4 高雄市政府交通局黃副局長榮輝(右4)現場觀摩無人機空拍作業
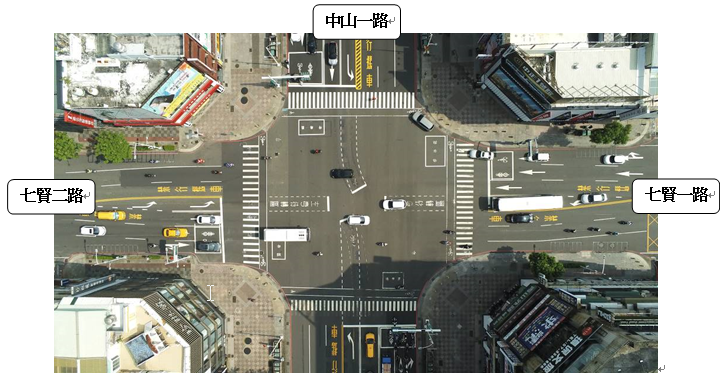
圖5 高雄市七賢一路、七賢二路、中山一路口之無人機空拍影像